Servo bits, ankle concept & Dev-Remote
It's been a while so I thought I'd post a quick something...
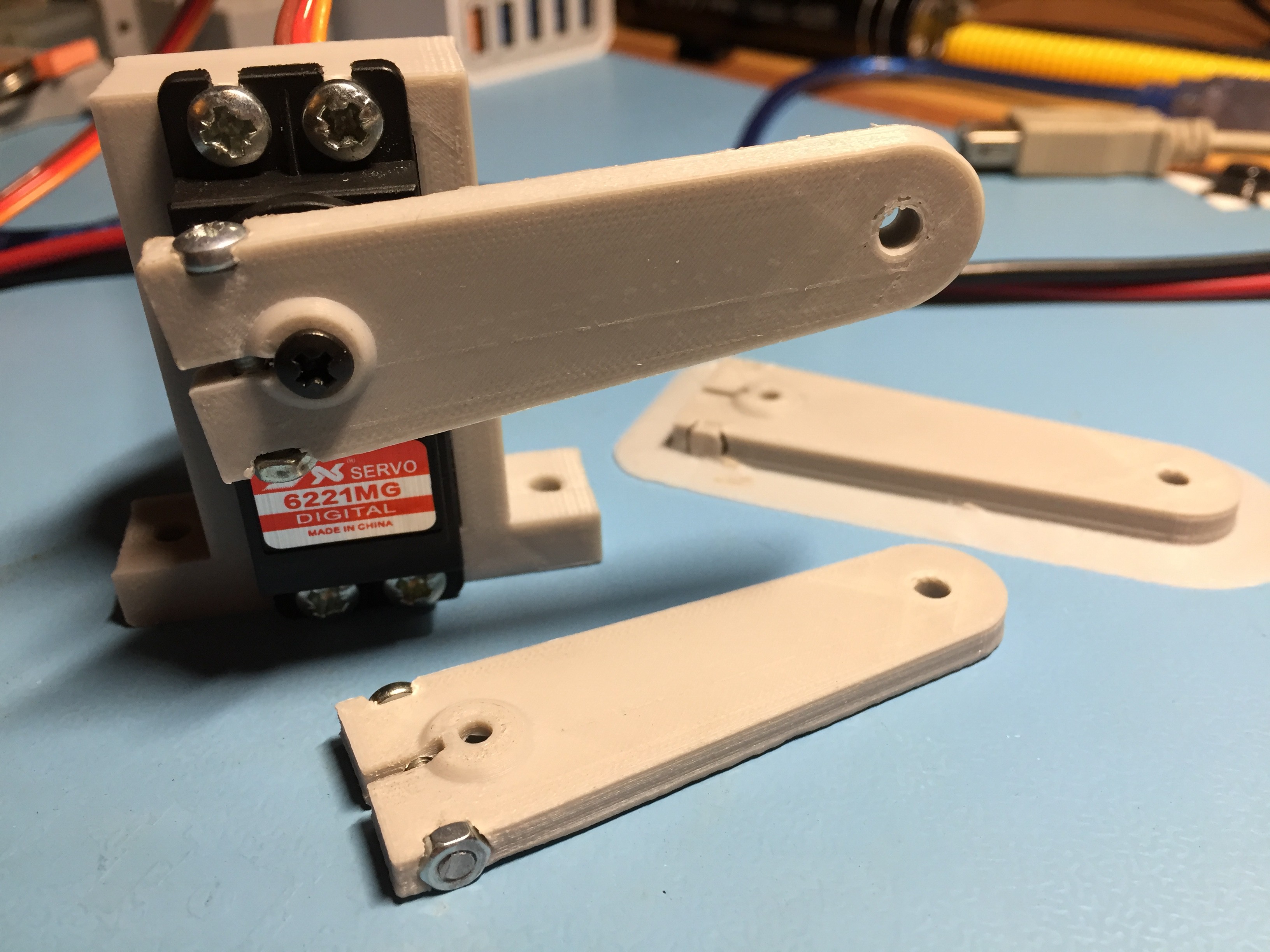 |
| Mounts and arms available on Thingiverse. |
A while ago I created some parts for the heavy duty standard sized servos that I'm planning to use in the bot's "head" mechanism. They're nothing fancy, but they're available on Thingiverse:
I have six servos arranged around the head to provide the pitch and roll that I want (to keep head/sensors level as the body moves around) in addition to be able to raise and lower a little bit. It is effectively a Stewart Platform but I don't need yaw or horizontal translations so it should make the maths a little bit easier. The head spin motor and index sensors are functional but the control code could do with some further love.
 |
| Still early days. |
I have also been thinking about the legs, specifically how to mount and actuate the wheel/foot/ankle. I'm thinking of using the BLDC hub motors of "hoverboards". Though the name irritates me their motors/wheels seem well suited to my requirements. I modelled how I could actuate a foot but quickly realised it'll need more thought. The flawed concept is shown below.
 |
| Flawed concept. |
Also, I'm currently printing an enclosure for a development remote; a battery powered platform with a 20x4 LCD and 3-axis joystick and some buttons, linked via Bluetooth. Intended as a tool to help early debug and give me a flexible terminal for simple display and control. Had to split the main body in order to fit it on the build platform of my printer.


 |
| WIP |


Comments
Post a Comment